
Un asservissement par électro-aimants
La conception du système de stabilisation s’oriente vers un système d’électroaimant actif. Ce système présenterait les avantages suivants:
- Simple à concevoir et fabriquer: En se basant sur le montage open-source disponible ici 3, la conception et fabrication de ce système ne nécessite que des compétences de base en électronique. Pas de programmation, ni d’asservissement.
- Economique: En ayant des composants électroniques basiques sur les chariots sustentateurs et uniquement des pièces métalliques en guise de rail de guidage, la mise en œuvre coûte moins cher que l’utilisation d’aimants permanents
- Simple à utiliser: Face aux difficultés rencontrées pour stabiliser le chariot avec des aimants permanents, l’utilisation d’un système actif rend la mise en œuvre beaucoup plus simple.
Barrière laser et électroaimant
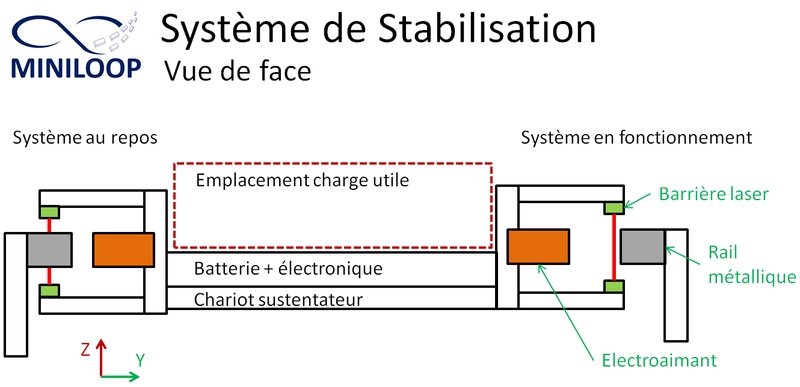
Comme Indiqué sur le schéma, la mise en œuvre nécessite l’ajout de 2 rails à placer sur les côtés du wagon. Ces rails doivent avoir deux propriétés spécifiques:
- Opaques : pour couper les barrières lasers et détecter la détection de position du wagon
- Métalliques : Pour interagir magnétiquement avec les électroaimants et pouvoir attirer le wagon.
Ainsi, le système fonctionne de la manière suivante :
- Lorsque celle-ci est coupée, le wagon est en position optimale, l’électroaimant correspondant est éteint
- Lorsque celle-ci est n’est pas coupée, le wagon dérive, l’électroaimant situé sur le côté opposé est allumé.
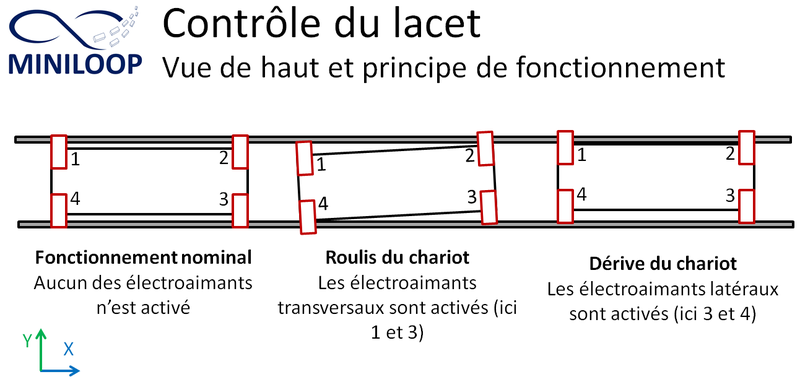
Maîtriser la dérive horizontale et le lacet
Comme indiqué sur le schéma suivant un minimum de 4 boucles d’asservissements est nécessaire pour maintenir le wagon dans sa position optimale :
RETEX : Nécessité de concevoir un électroaimant spécifique
Des étudiants de Grenoble INP-Phelma, notre partenaire ont mis en œuvre et testé un système d’asservissement basé sur la mise en œuvre décrite. Malheureusement, il s’est avéré que les électroaimants disponibles dans le commerce sont ou pas assez puissants ou « trop gros » (= lourds/disgracieux) pour une application à Miniloop. C’est pourquoi nous nous attelons à concevoir nos propres électroaimants correspondant à notre besoin.
Foire Aux Questions
Pourquoi ne pas proposer un système passif avec des aimants ?
Un système de stabilisation horizontal passif présente certes une position d’équilibe, mais il s’agit d’une position d’équilibre instable : Sitôt que le wagon dérivera sur un des côté, la force d’attraction vers ce côté va augmenter alors que la force d’attraction vers l’autre côté va diminuer.
Pourquoi ne pas acheter plusieurs petits électroaimants du commerce ?
C’est trop cher : Les plus gros électroaimants que nous avons testés sont des électroaimants professionnels (mais accessible au grand public) à 50€ L’un. Même en les branchant 4 par 4 la force magnétique est insuffisante. D’où la justification de la conception de pièce spécifique à notre besoin.
Fabriquer nos propres électroaimants il faut des moyens industriels !
Tout comme l’intégralité de miniloop, les électroaimants seront conçus et fabriqués grâce à des moyens financiers et machines accessible à tous.